2024
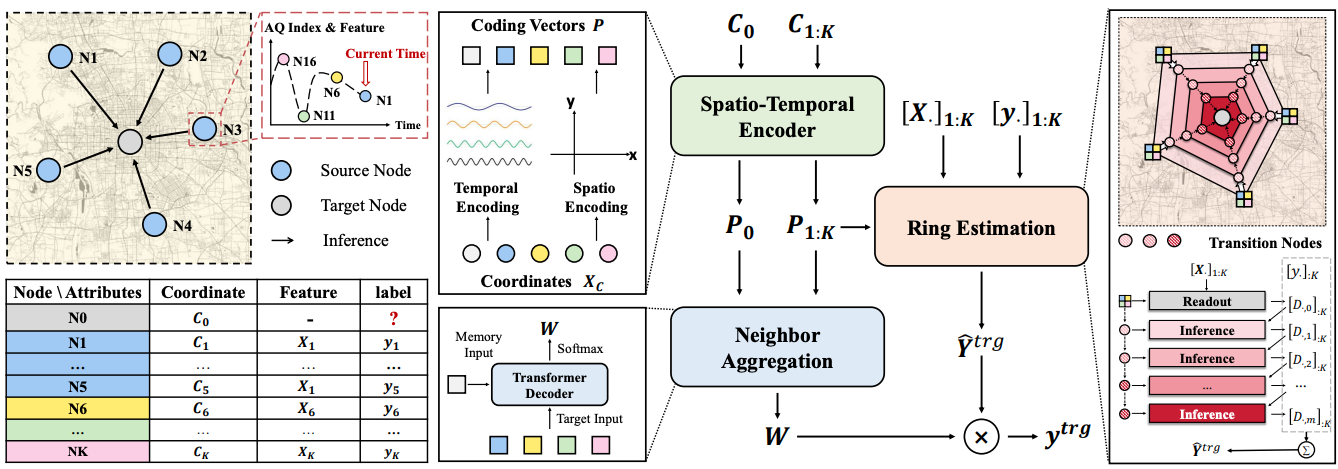
Spatio-Temporal Field Neural Networks for Air Quality Inference
Yutong Feng, Qiongyan Wang, Yutong Xia, Junlin Huang, Siru Zhong, Yuxuan Liang
International Joint Conference on Artificial Intelligence (IJCAI) 2024 Conference
In this work, we make the first attempt to combine two different spatio-temporal perspectives, fields and graphs, by proposing a new model, Spatio-Temporal Field Neural Network, and its corresponding new framework, Pyramidal Inference.

Deep Structural Knowledge Exploitation and Synergy for Estimating Node Importance Value on Heterogeneous Information Networks
Yankai Chen, Yixiang Fang, Qiongyan Wang, Xin Cao, Irwin King
In Proceeding of AAAI Conference on Artificial Intelligence (AAAI) 2024 Conference
We propose a novel learning framework: SKES. Different from previous automatic learning designs, SKES exploits heterogeneous structural knowledge to enrich the informativeness of node representations.
2022
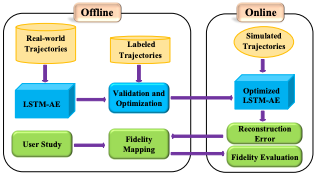
Fidelity Evaluation of Virtual Traffic Based on Anomalous Trajectory Detection
Chaoneng Li, Qianwen Chao, Guanwen Feng, Qiongyan Wang, Pengfei Liu, Yunan Li, Qiguang Miao
International Conference on Intelligent Robots and Systems (IROS) 2022 Conference
We design a perceptual evaluation on virtual traffic fidelity and derive a mapping from the reconstruction error to the evaluation score.
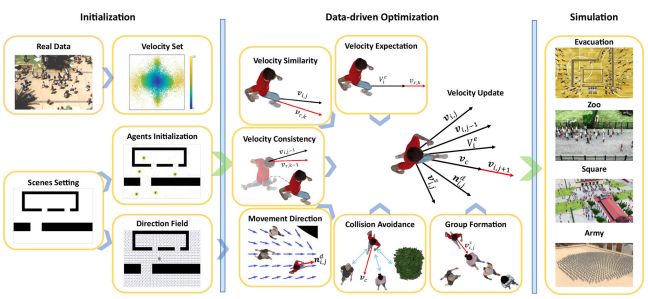
Velocity-based dynamic crowd simulation by data-driven optimization
Pengfei Liu, Qianwen Chao, Henwei Huang, Qiongyan Wang, Zhongyuan Zhao, Qi Peng, Milo K. Yip, Elvis S. Liu, Xiaogang Jin
The Visual Computer 2022 Journal
We present a novel velocity-based framework based on data-driven optimization to build dynamic crowd simulation that allows interactive control of global navigation, local collision avoidance, and group formation.